


•
첫번째 Hidden layer
•
두번째 Hidden layer
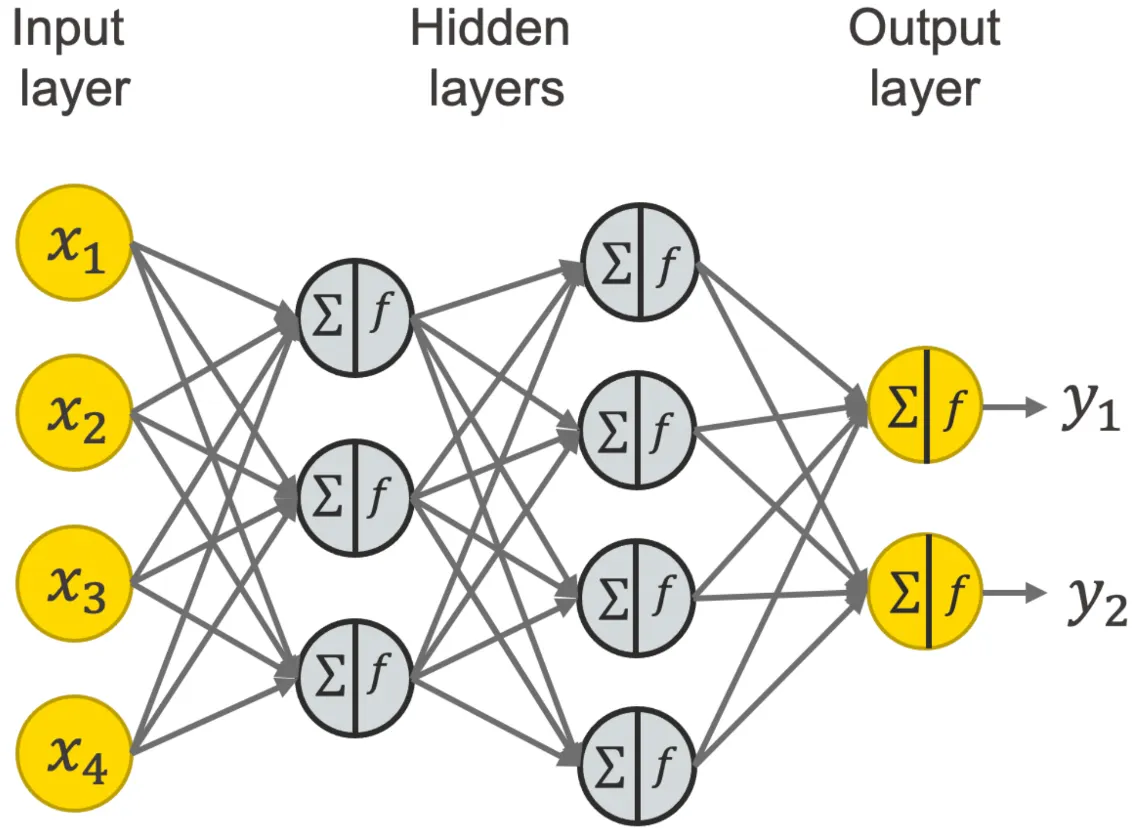
Components of a neural network
•
weight(가중치) = 네트워크의 출력이 예상 출력 값에 얼마나 근접하는지에 영향
•
bias(편향) = 활성화 함수의 출력과 의도한 출력 간의 차이]

%matplotlib inline
# 리눅스/윈도우 등과 같은 os를 사용할 수 있게 도와주는 모듈
import os
# deep learning 모델을 생성/학습/추론 등을 도와주는 모듈
import torch
# nn -> neural network -> 딥러닝 모델
from torch import nn
# torch의 DataLoader -> 딥러닝 모델이 학습을 할 수 있도록 데이터를 배치 크기 단위로 제공하는 모듈
from torch.utils.data import DataLoader
# datasets -> 학습용 데이터를 딥러닝 모델이 이해할 수 있도록 torch로 형변환하는 모듈
# transforms -> features 데이터를 전처리 해주는 모듈
from torchvision import datasets, transforms
Python
복사
1. 훈련에 사용될 하드웨어 디바이스 선택
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print(f'Using {device} device')
Python
복사
2. nn.Module 클래스 정의
# 딥러닝 모델을 만들려면, nn.Module을 상속 받아야 함!!!
# -> 생성함수(__init__)
# -> 학습함수에서 사용할 변수를 선언
# -> 학습함수(forward)
# -> input으로 features 받아야 함!!
class NeuralNetwork(nn.Module):
# 생성함수 -> 자식 클래스를 인스턴스화
def __init__(self):
# super() 부모 클래스 -> nn.Module
# super().__init__() -> 부모 클래스를 인스턴스화
super().__init__() # super(NeuralNetwork, self).__init__()
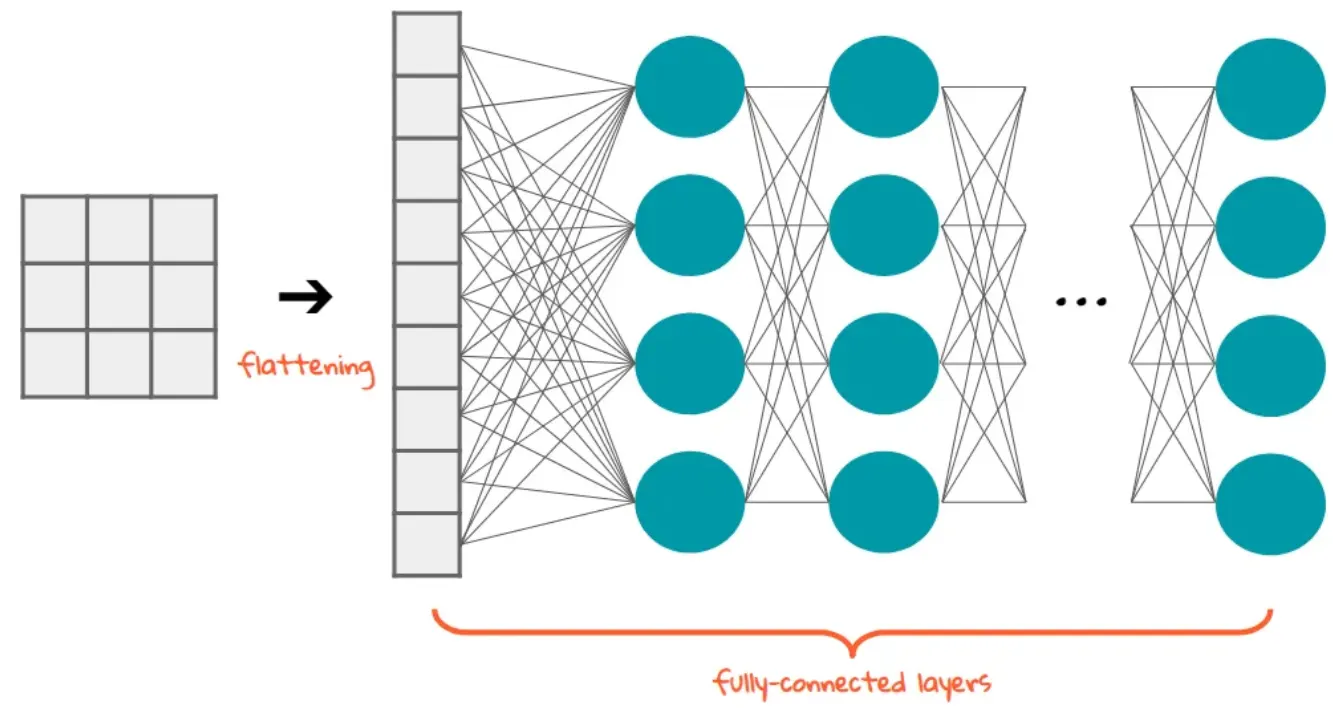
# nn.Flatten() -> n 차원의 데이터를 vector로 변경해주는 함수
# -> (28,28) -> (28*28,)
self.flatten = nn.Flatten()
# nn.Sequential -> 안에 있는 레이어를 순서대로 실행해주는 함수
self.linear_relu_stack = nn.Sequential(
# nn.Linear(input_size, output_size) -> 선형 모델
# 첫번째 레이어의 input_size는 features_size와 같다!
# -> 28*28 크기를 갖는 feature만 학습이 가능
nn.Linear(28*28, 512),
# nn.ReLU() -> 활성화 함수(선현 모델을 비선형 모델로 변경해주는 역할)
nn.ReLU(),
# 두번째 레이어의 input_size는 첫번째 레이어의 output_size와 같다.
nn.Linear(512, 512),
nn.ReLU(),
# 세번째 레이어의 output_size는 target_size와 같다.
# -> target_size는 10
# 세번째 레이어의 input_size는 두번째 레이어의 output_size와 같다.
nn.Linear(512, 10),
nn.ReLU()
)
def forward(self, x): # (batch_size, 28, 28)
print("학습 시작했어요 ^^")
out_flatten = self.flatten(x) # out_flatten: (batch_size, 28*28)
logits = self.linear_relu_stack(out_flatten) # logits: (batch_size, 10)
return logits
Python
복사
•
NeuralNetwork를 만들고 device에 적용
model = NeuralNetwork().to(device) # 하드웨어에 모델 저장
print(model)
Python
복사
NeuralNetwork(
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear_relu_stack): Sequential(
(0): Linear(in_features=784, out_features=512, bias=True)
(1): ReLU()
(2): Linear(in_features=512, out_features=512, bias=True)
(3): ReLU()
(4): Linear(in_features=512, out_features=10, bias=True)
(5): ReLU()
)
)
Python
복사
4.Model layers
# (batch_size, features1, features2)
input_image = torch.rand(3, 28, 28)
print(input_image.size())
Python
복사
nn.Flatten
# flatten 생성
flatten = nn.Flatten()
flat_image = flatten(input_image) # (3, 28, 28)
print(flat_image.size()) # (3, 28 * 28)
Python
복사
nn.Linear
# linear 생성
layer1 = nn.Linear(in_features=28*28, out_features=20)
hidden1 = layer1(flat_image) # flat_image -> (3, 28 * 28)
print(hidden1.size()) # hidden1 -> (3, 20)
Python
복사
nn.ReLU
•
Linear output: x = weight * input + bias
•
ReLU: f(x) = 0 if x < 0 else x
print(f"Before ReLU: {hidden1}\n\n")
hidden1 = nn.ReLU()(hidden1)
print(f"After ReLU: {hidden1}")
Before ReLU: tensor([[ 0.2826, -0.4782, -0.0358, -0.6311, 0.4889, -0.1665, 0.4779, -0.1052,
0.1502, 0.0660, 0.3299, 0.6115, -0.2084, 0.5777, 0.0515, 0.0722,
0.6335, 0.0632, 0.4001, -0.4047],
[ 0.3017, -0.1036, -0.2424, -0.7319, 0.1596, 0.1269, 0.4524, -0.1588,
0.0712, -0.0481, 0.3125, 0.6833, -0.2455, 0.7615, 0.1625, -0.0434,
0.7479, 0.2325, 0.1314, -0.1276],
[ 0.4567, -0.5776, -0.2184, -0.3951, 0.1225, -0.0140, 0.4541, -0.0516,
-0.1272, -0.0818, 0.3577, 0.7219, -0.2957, 0.5377, 0.0630, -0.1395,
0.9187, 0.3089, -0.1543, -0.1834]], grad_fn=<AddmmBackward0>)
After ReLU: tensor([[0.2826, 0.0000, 0.0000, 0.0000, 0.4889, 0.0000, 0.4779, 0.0000, 0.1502,
0.0660, 0.3299, 0.6115, 0.0000, 0.5777, 0.0515, 0.0722, 0.6335, 0.0632,
0.4001, 0.0000],
[0.3017, 0.0000, 0.0000, 0.0000, 0.1596, 0.1269, 0.4524, 0.0000, 0.0712,
0.0000, 0.3125, 0.6833, 0.0000, 0.7615, 0.1625, 0.0000, 0.7479, 0.2325,
0.1314, 0.0000],
[0.4567, 0.0000, 0.0000, 0.0000, 0.1225, 0.0000, 0.4541, 0.0000, 0.0000,
0.0000, 0.3577, 0.7219, 0.0000, 0.5377, 0.0630, 0.0000, 0.9187, 0.3089,
0.0000, 0.0000]], grad_fn=<ReluBackward0>)
Python
복사
nn.Sequential
# nn.Sequential -> 안에 있는 레이어를 순서대로 실행
seq_modules = nn.Sequential(
flatten,
layer1, # (28*28, 20)
nn.ReLU(),
nn.Linear(20, 10)
)
input_image = torch.rand(3,28,28)
logits = seq_modules(input_image)
> logits.shape
torch.Size([3, 10])
Python
복사
nn.Softmax
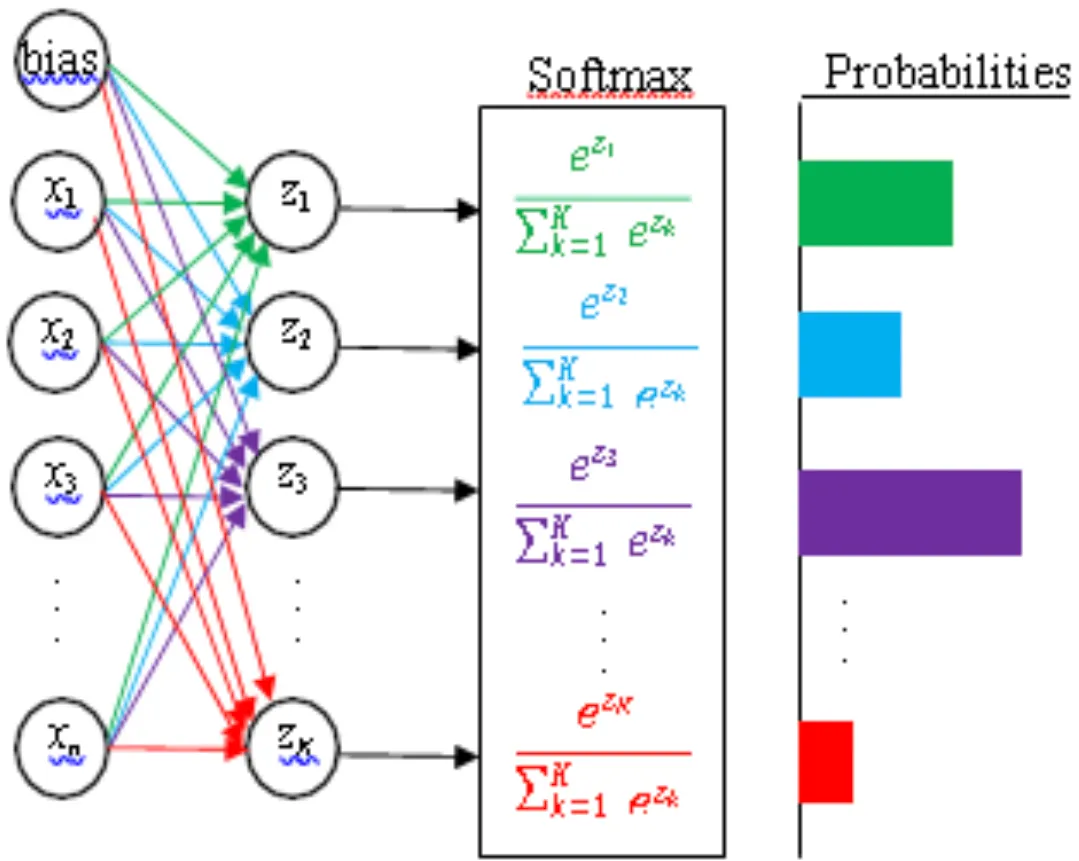
softmax = nn.Softmax(dim=1)
pred_probab = softmax(logits)
> pred_probab.shape
torch.Size([3, 10])
Python
복사
5.Model parameters
print("Model structure: ", model, "\n\n")
for i, (name, param) in enumerate(model.named_parameters()):
print(f"{i}번째, Layer: {name} | Size: {param.size()} | Values : {param[:2]} \n")
Python
복사
Model structure: NeuralNetwork(
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear_relu_stack): Sequential(
(0): Linear(in_features=784, out_features=512, bias=True)
(1): ReLU()
(2): Linear(in_features=512, out_features=512, bias=True)
(3): ReLU()
(4): Linear(in_features=512, out_features=10, bias=True)
(5): ReLU()
)
)
0번째, Layer: linear_relu_stack.0.weight | Size: torch.Size([512, 784]) | Values : tensor([[ 0.0051, -0.0264, 0.0349, ..., -0.0113, -0.0163, 0.0005],
[-0.0279, -0.0011, -0.0182, ..., -0.0355, -0.0305, -0.0042]],
grad_fn=<SliceBackward0>)
1번째, Layer: linear_relu_stack.0.bias | Size: torch.Size([512]) | Values : tensor([ 0.0289, -0.0258], grad_fn=<SliceBackward0>)
2번째, Layer: linear_relu_stack.2.weight | Size: torch.Size([512, 512]) | Values : tensor([[-0.0179, -0.0038, -0.0322, ..., -0.0206, -0.0286, -0.0135],
[ 0.0012, -0.0280, -0.0273, ..., -0.0417, 0.0397, 0.0163]],
grad_fn=<SliceBackward0>)
3번째, Layer: linear_relu_stack.2.bias | Size: torch.Size([512]) | Values : tensor([-0.0415, 0.0110], grad_fn=<SliceBackward0>)
4번째, Layer: linear_relu_stack.4.weight | Size: torch.Size([10, 512]) | Values : tensor([[-0.0071, 0.0086, 0.0301, ..., 0.0281, -0.0350, 0.0328],
[ 0.0209, -0.0027, -0.0258, ..., -0.0195, -0.0110, 0.0344]],
grad_fn=<SliceBackward0>)
5번째, Layer: linear_relu_stack.4.bias | Size: torch.Size([10]) | Values : tensor([0.0156, 0.0235], grad_fn=<SliceBackward0>)
Python
복사
Automatic differentiation(자동미분)
•
Gradient Descent를 이용해 손실함수의 최솟값을 쫓아가면서 가중치들을 업데이트하는 것
•
Automatic differentiation은 Forward Propagation(순전파) -> Backward Propagation(역전파) 순서로 진행된다.
Forward Propagation(순전파)
•
신경망은 정답을 맞추기 위해 최선의 추측을 한다.
•
이렇게 추측을 하기 위해서 입력 데이터를 각 함수들에서 실행한다.
Backward Propagation(역전파)
•
신경망은 추측한 값에서 발생한 오류에 비례하여 매개변수들을 적절히 조절한다.
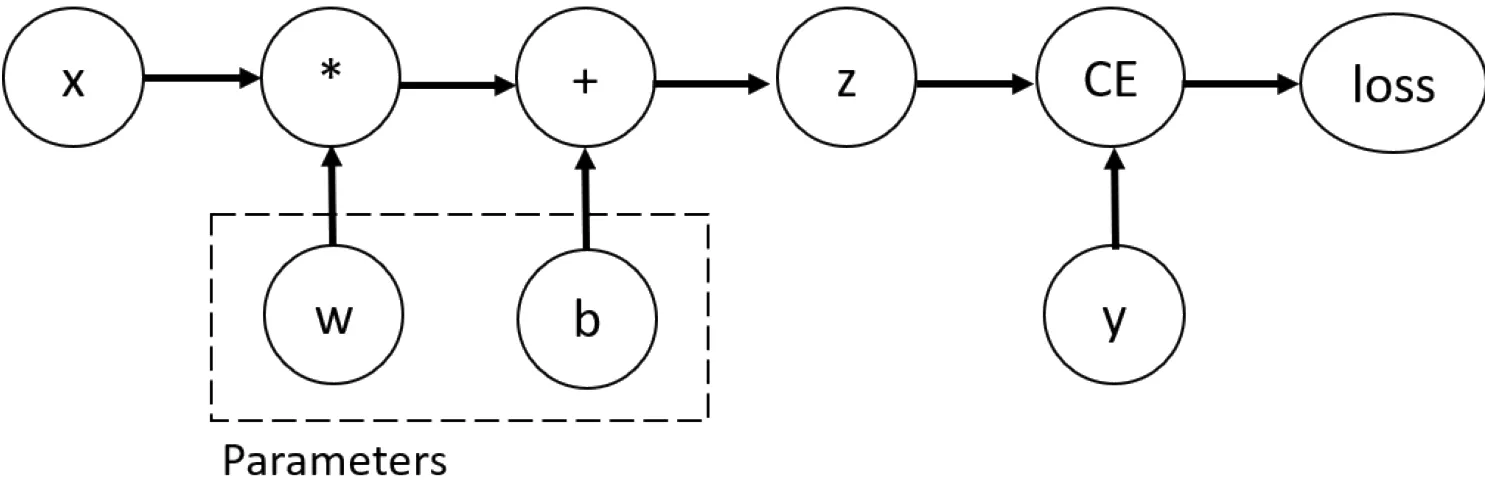
Tensors, Functions and Computational graph
•
z: prediction(예측값)
•
x: features(피처)
•
y: target(타겟)
•
CE: loss function(손실 함수)
◦
target과 prediction 차이를 숫자로 표현하는 함수
Computing gradients
loss.backward()
print(w.grad)
print(b.grad)
Python
복사
tensor([[0.3202, 0.0967, 0.0895],
[0.3202, 0.0967, 0.0895],
[0.3202, 0.0967, 0.0895],
[0.3202, 0.0967, 0.0895],
[0.3202, 0.0967, 0.0895]])
tensor([0.3202, 0.0967, 0.0895])
Python
복사
Disabling gradient tracking
z = torch.matmul(x, w)+b
> print(z.requires_grad)
True
with torch.no_grad(): # No gradient tracking(테스트용)
z = torch.matmul(x, w)+b
> print(z.requires_grad)
False
Python
복사
•
다른 방법 : 텐서에서 detach() 메소드 사용하기
z = torch.matmul(x, w)+b
z_det = z.detach() # No gradient tracking(테스트용)
print(z_det.requires_grad)
Python
복사
