



고유값과 고유벡터
•
정방 행렬 A를 선형 변환으로 봤을 때, 선형 변환 A에 의한 변환 결과가 자기 자신의 상수 배가 되는 0이 아닌 벡터를 고유벡터(eigenvector)라고 하고, 이 상수배 값을 고유값(eigenvalue)이라 칭한다.
정방 행렬 A에 대해서 를 만족하는 0이 아닌 열벡터 v = 고유 벡터, 상수 λ = 고유값

고유값, 고유 벡터는 정방 행렬에 대해서만 정의
정방 행렬 : 행(row)과 열(column)의 수가 같은 행렬을 의미 (n×m: n=m)
•
어떠한 선형 변환 A를 했을 때, 그 크기만 변하고 방향이 변하지 않는 벡터
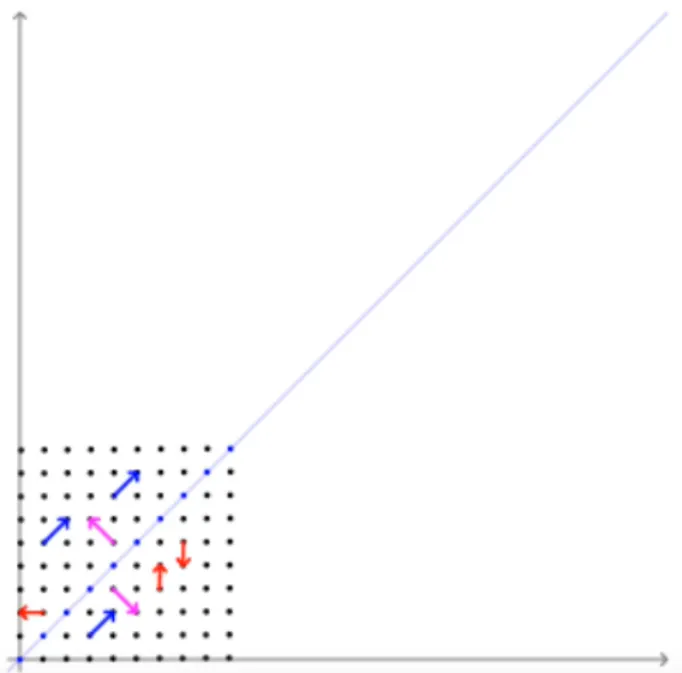
그림1 (출처: 공돌이의 수학정리노트 유튜브)
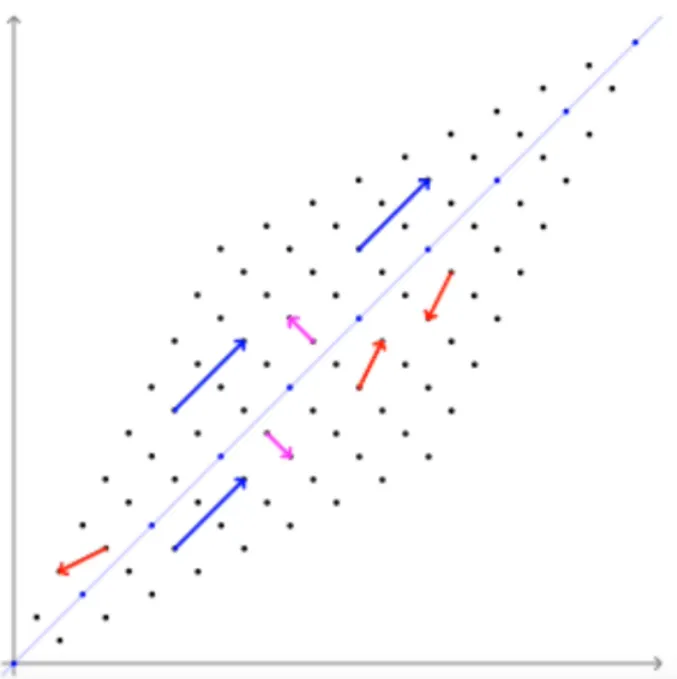
그림2 (출처: 공돌이의 수학정리노트 유튜브)
•
어떠한 선형 변환 A를 했을 때, 그 크기만 변하고 방향이 변하지 않는 벡터
⇒ 고유값과 고유벡터가 존재
1.
파란색 벡터
•
파란색 벡터는 선형 변환 후 크기만 변하고 방향은 유지 ⇒ 고유벡터
•
고유값은 (그림 2의 파란색 벡터 크기 / 그림 1의 파란색 벡터 크기) == 즉, 증가한 벡터 크기 비율
2.
빨간색 벡터
•
빨간색 벡터는 선형 변환후 방향과 크기가 모두 변함
⇒ 방향이 바꼈으므로 고유 벡터가 아니다.
3.
분홍색 벡터
•
분홍색 벡터는 선형 변환 후 크기도 방향도 유지 ⇒ 고유벡터
•
따라서 분홍색 벡터도 고유 벡터이며, 고유값은 벡터 크기가 동일하므로 1
고유값
•
행렬 𝐴의 고윳값은 다음 식을 만족하는 스칼라 값 𝜆
◦
det는 행렬의 행렬식(determinant), 𝐼는 단위 행렬
◦
고유값은 해당 행렬이 어떤 선형 변환을 가지고 있는지, 그 변환 중에서 큰 변화가 일어나는 값으로 해석
◦
예를 들어, 주어진 행렬이 고윳값 𝜆를 갖는다면, 해당 행렬의 변환은 𝜆만큼 크기가 변하는 효과를 가지게 된다.
고유벡터 (Eigenvectors):
•
고유벡터는 해당 고윳값에 대응하는 벡터로, 다음 식을 만족
◦
𝑣는 고유벡터이며, 𝜆는 고윳값
◦
고유벡터는 행렬이 가진 선형 변환에서 크기만 변하지 않고 방향만 변하는 특별한 벡터를 표시
◦
즉, 행렬이 적용될 때 고유벡터의 방향은 변하지 않고, 그 크기만 상수 배만큼 변할 뿐
◦
주로 주성분 분석, 특이값 분해 등 다양한 응용에서 사용
고유값 분해(eigen decomposition)
•
행렬 A의 고유값을 , 고유벡터를 이라 하였을 때
해당 식을 행렬로 나타내면
•
행렬 A를 고유 벡터와 고유값으로 분해
◦
P =행렬 A의 고유 벡터들을 열벡터로 하는 행렬
◦
Λ = 고유값을 대각원소로 가지는 대각 행렬
고유값 분해 수식
이어서 일 때,
일 때,,
고유 벡터의 순서에서 고유벡터행렬P를 얻고 ,
이어서 로 부터 대각화 행렬 을 얻는다.
행렬 A에 대한 고윳값 분해는 다음과 같다.
특수한 경우
•
•
