


전치 행렬 (Transpose Matrix) : 대각선 뒤집기
•
원래 행렬의 행과 열을 뒤바꾼 행렬
•
A의 i행 j열 원소를 a_ij라 할 때, 행렬 A의 전치행렬 A^T는 다음과 같다.
◦
A는 𝑛×𝑚크기의 행렬이며, 𝐴^𝑇는 𝑚×𝑛 크기의 전치행렬
전치행렬의 특징
1.
전치행렬의 전치행렬은 원래 행렬과 동일
2.
두 행렬의 합의 전치는 각각의 전치행렬의 합과 동일
3.
상수 k를 곱한 행렬의 전치는 상수를 전치한 행렬에 곱한것과 동일
4.
두 행렬의 곱의 전치는 각각의 전치행렬을 역순으로 곱한 것과 동일
행렬의 곱에 전치행렬을 취하면 순서가 역순으로 변경
Python 코드 예시 (NumPy 활용)
import numpy as np
# 행렬 생성
matrix = np.array([[1, 2, 3],
[4, 5, 6]])
# 전치행렬 계산
transpose_matrix = np.transpose(matrix)
print("원래 행렬:")
print(matrix)
print("전치행렬:")
print(transpose_matrix)
Python
복사
대칭/대각 행렬
대칭 행렬(Symmetric Matrix) : 대각선 거울
•
전치(transpose)한 행렬과 원래 행렬이 같은 행렬
•
행렬의 대각선( )을 기준으로 대칭되는 원소들이 같은 값을 가지는 행렬
)을 기준으로 대칭되는 원소들이 같은 값을 가지는 행렬
)을 기준으로 대칭되는 원소들이 같은 값을 가지는 행렬•
주로 실수들로 구성되며, 중복된 정보를 가지고 있는 경우에 주로 사용
◦
A_ij와 A_ji의 값이 동일 (i와 j는 행렬의 행과 열의 index)
대각 행렬 (Diagonal Matrix) : 중앙값 제외 값 0
•
대각선 상의 원소 이외의 원소가 모두 0인 행렬
•
다양한 수학적 연산과 변환을 표현할 때 사용
◦
대각선 외의 원소는 모두 0
Python 코드 예시 (NumPy 활용)
import numpy as np
# 대칭행렬 생성
symmetric_matrix = np.array([[1, 2, 3],
[2, 4, 5],
[3, 5, 6]])
print("대칭행렬:")
print(symmetric_matrix)
대칭행렬:
[[1 2 3]
[2 4 5]
[3 5 6]]
# 대각행렬 생성
diagonal_matrix = np.diag([2, 5, 8])
print("대각행렬:")
print(diagonal_matrix)
대각행렬:
[[2 0 0]
[0 5 0]
[0 0 8]]
Python
복사
반대칭 행렬(Skew-Symmetric Matrix)
•
전치행렬이 원래 행렬의 음수인 행렬
특징
1.
대각원소는 모두 0
2.
다른 모든 원소에 대해 해당 수식 성립
예시
계산하기
•
행렬 A에 대하여
◦
행렬 A가 skew-symmetric하려면 해당 조건을 만족해야함
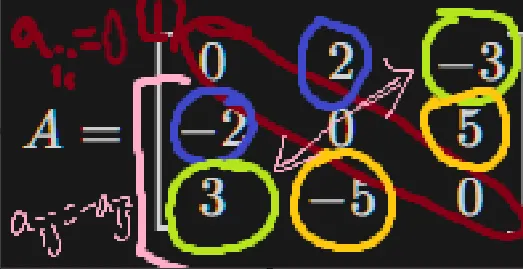
1.
대각 원소가 모두 0
•
대각 원소가 모두 (1,1), (2,2), (3,3) 모두 0 (Satisfied)
2.
대각 원소가 아닌 원소들에 대해 a_{ij} = -a_{ij}만족
a.
𝑎_{12}=2, −𝑎_{21}=−(−2)=2, (Satisfied)
b.
𝑎_{13}=−3 , −𝑎_{31}=−3 (Satisfied)
c.
𝑎_{23}=5 , −𝑎{32}=−5 (Satisfied)
▪
모든 조건을 만족하므로, 행렬 A는 skew-symmetric 함
Skew-Symmetric Matrix의 활용
•
회전 변환과 관련된 문제에서 자주 활용
•
특정 물리적 시스템에서 나타나는 변환을 모델링하는 데에도 사용 가능
Python 코드 예시 (NumPy 활용)
import numpy as np
# Given matrix A
A = np.array([[0, 2, -3],
[-2, 0, 5],
[3, -5, 0]])
# Calculate the transpose of A
A_transpose = A.T
# Calculate the skew-symmetric matrix (-A_transpose)
skew_symmetric_matrix = -A_transpose
print("Given Matrix A:")
print(A)
Given Matrix A:
[[ 0 2 -3]
[-2 0 5]
[ 3 -5 0]]
print("\nTranspose of Matrix A:")
print(A_transpose)
Transpose of Matrix A:
[[ 0 -2 3]
[ 2 0 -5]
[-3 5 0]]
print("\nSkew-Symmetric Matrix:")
print(skew_symmetric_matrix)
Skew-Symmetric Matrix:
[[ 0 2 -3]
[-2 0 5]
[ 3 -5 0]]
Python
복사
